Polohový vektor a posunutí
Cvičení 1
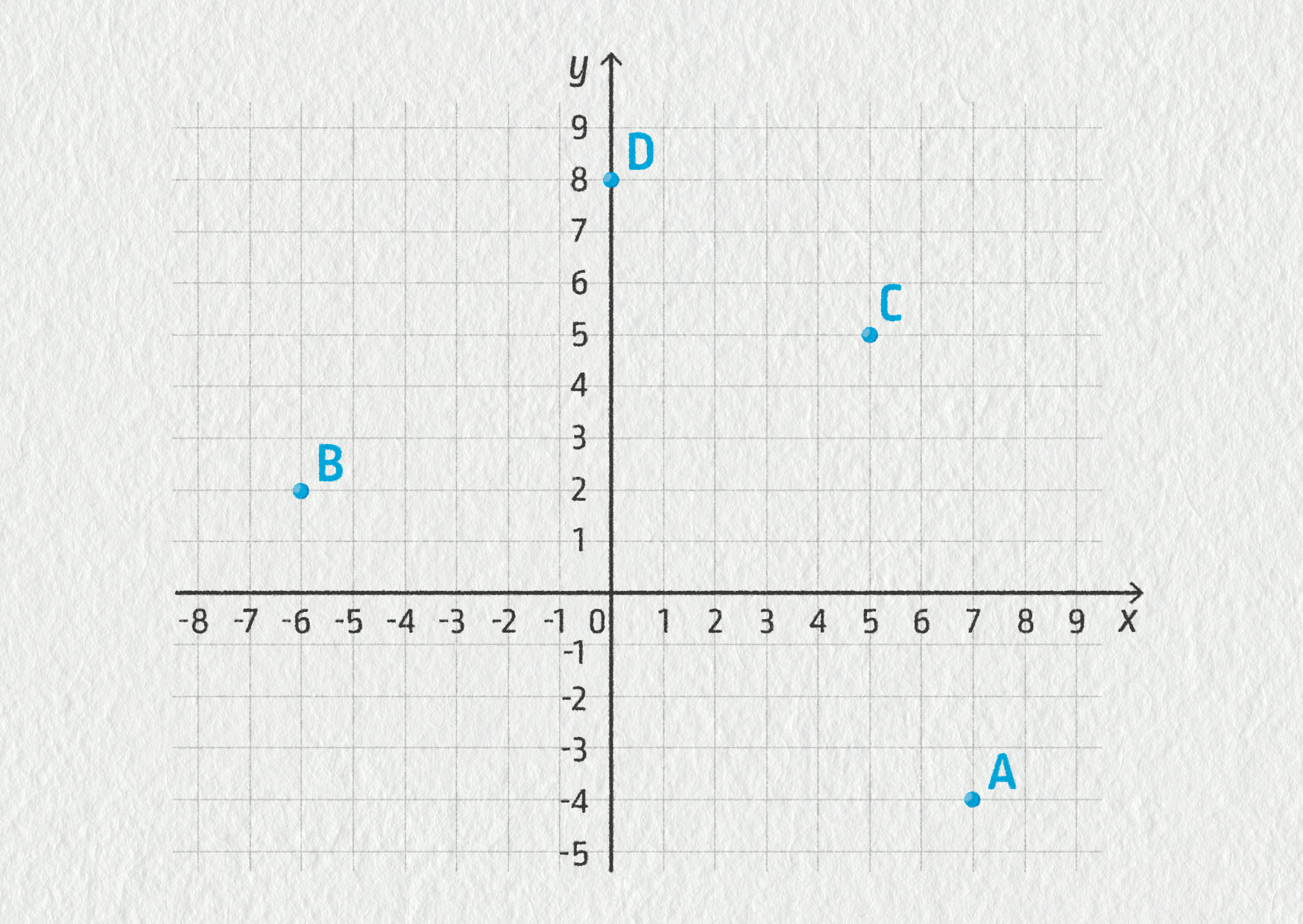
Určete složky polohových vektorů bodů A, B, C a D.
Zdroj
Cvičení 2
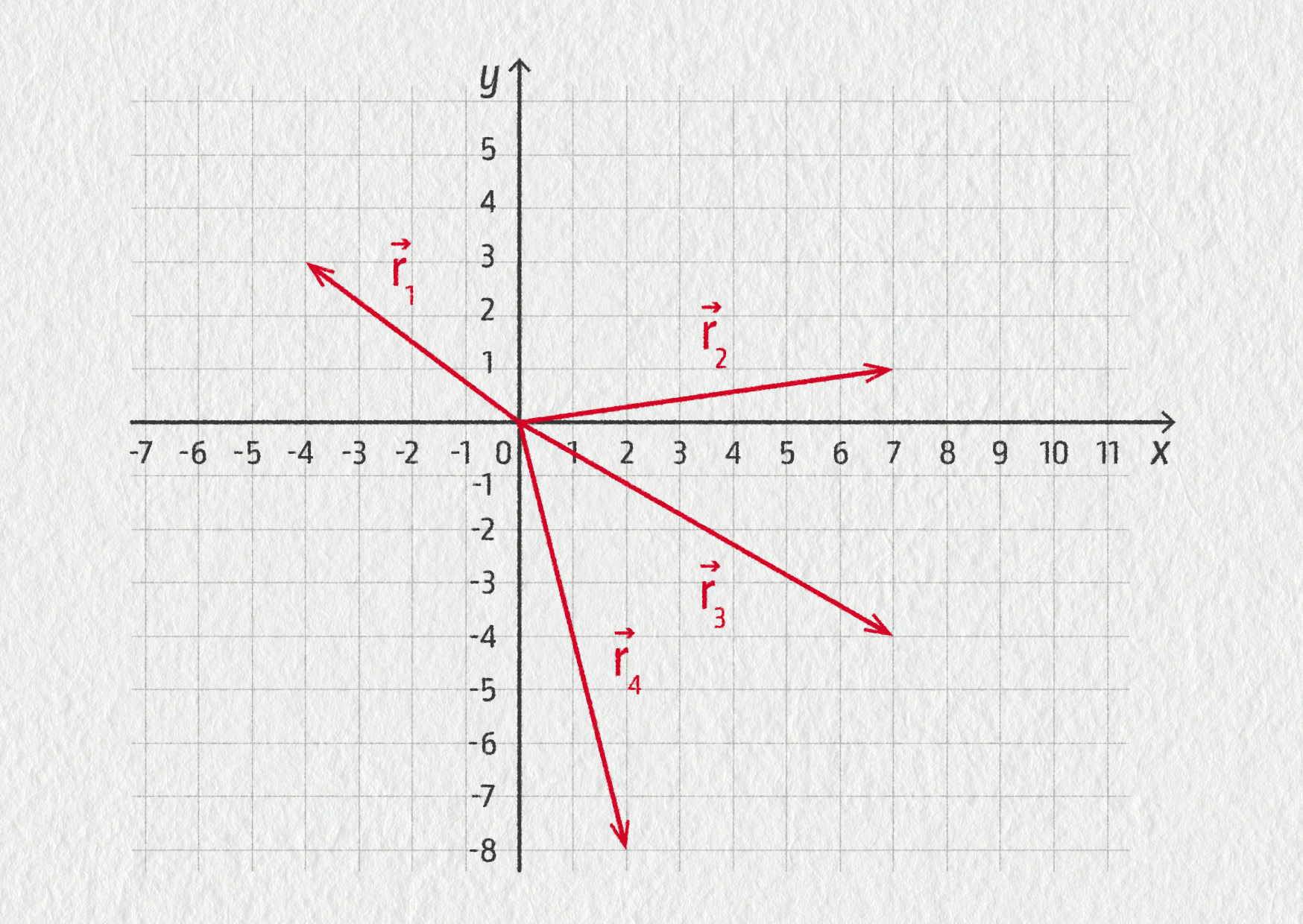
Zakreslete do kartézského souřadnicového systému polohové vektory \(\Vec{r}_1=(-4;3)\), \(\Vec{r}_2=(7;1)\), \(\Vec{r}_3=(7;-4)\), \(\Vec{r}_4=(2;-8)\)
Zdroj
Cvičení 3
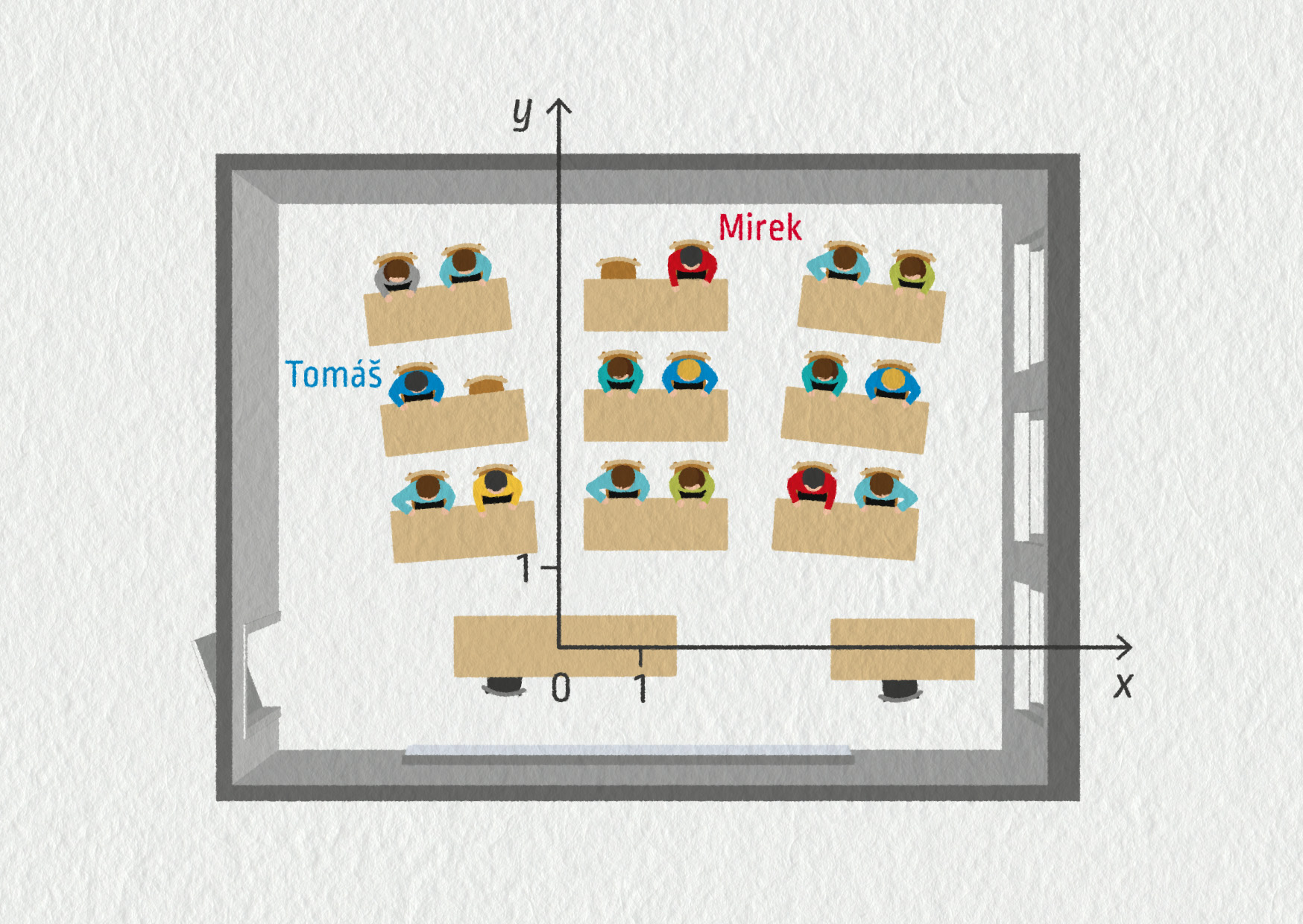
Mirek sedí v učebně fyziky (viz nákres).
Zdroj
- Určete polohový vektor, který určuje jeho místo v dané souřadnicové soustavě.
- Zapište vektor posunutí, když přejde za Tomášem, aby si půjčil zapomenuté pravítko.
- Nakreslete oba vektory do obrázku.
- Jaké budou složky vektoru posunutí, když se bude vracet zpět na své místo?
- Mirkovi se líbí spolužačka Marcela. Obvykle sedává na místě o souřadnicích (3 m; 1,5 m). Vidí na ni Mirek ze svého místa?
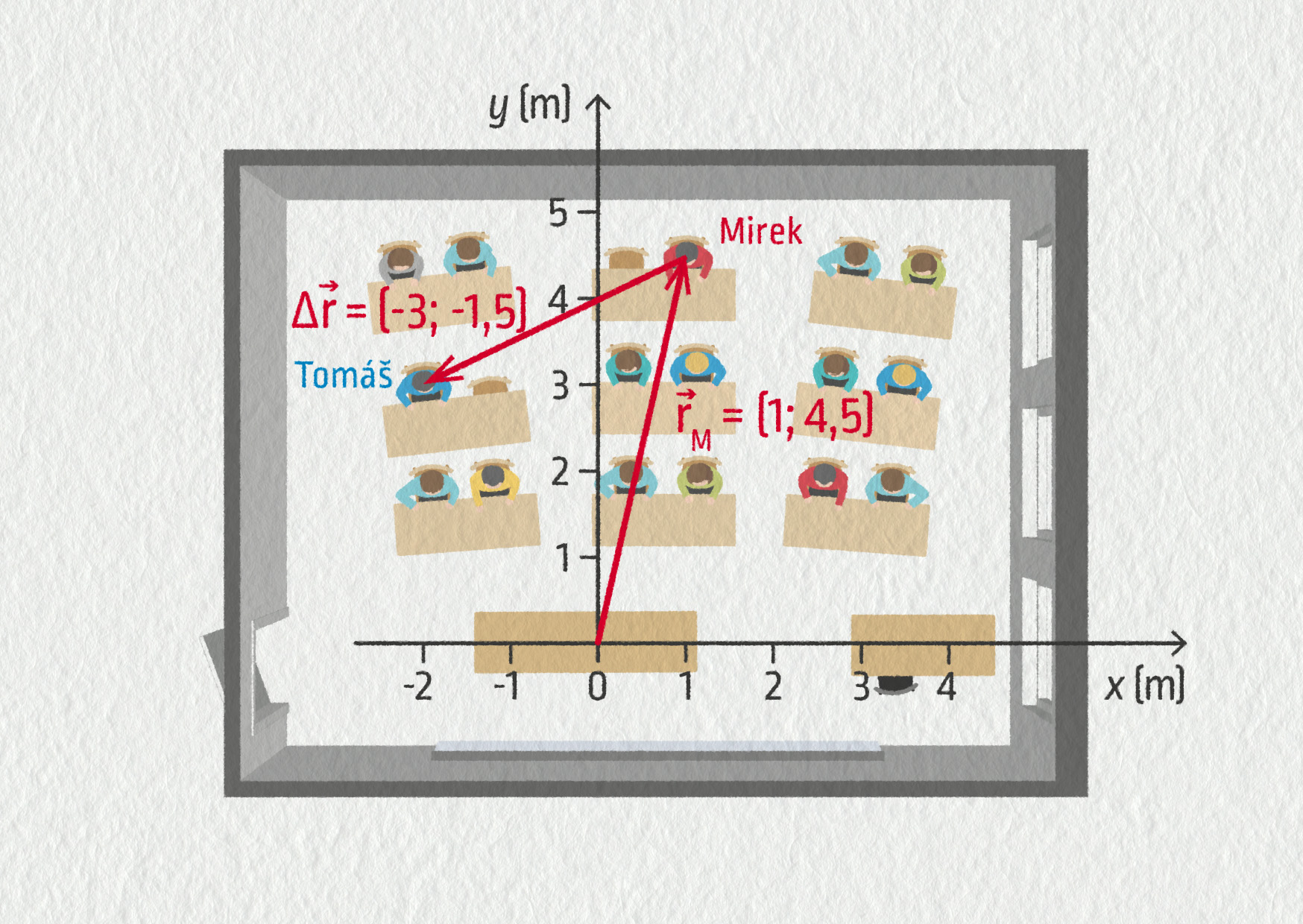
- \(\Vec{r}_\mathrm{M}=(1\ \mathrm{m};4{,}5\ \mathrm{m})\)
- \(\Vec{r}_\mathrm{T}=(-2\ \mathrm{m};3\ \mathrm{m})\), \(\Delta\Vec{r}=\Vec{r}_\mathrm{T}-\Vec{r}_\mathrm{M}=(-3\ \mathrm{m};-1{,}5\ \mathrm{m})\)
- řešení je na obrázku
- \(\Delta\Vec{r}=\Vec{r}_\mathrm{M}-\Vec{r}_\mathrm{T}=(3\ \mathrm{m};1{,}5\ \mathrm{m})\)
- ano, vidí
Zdroj
Cvičení 4
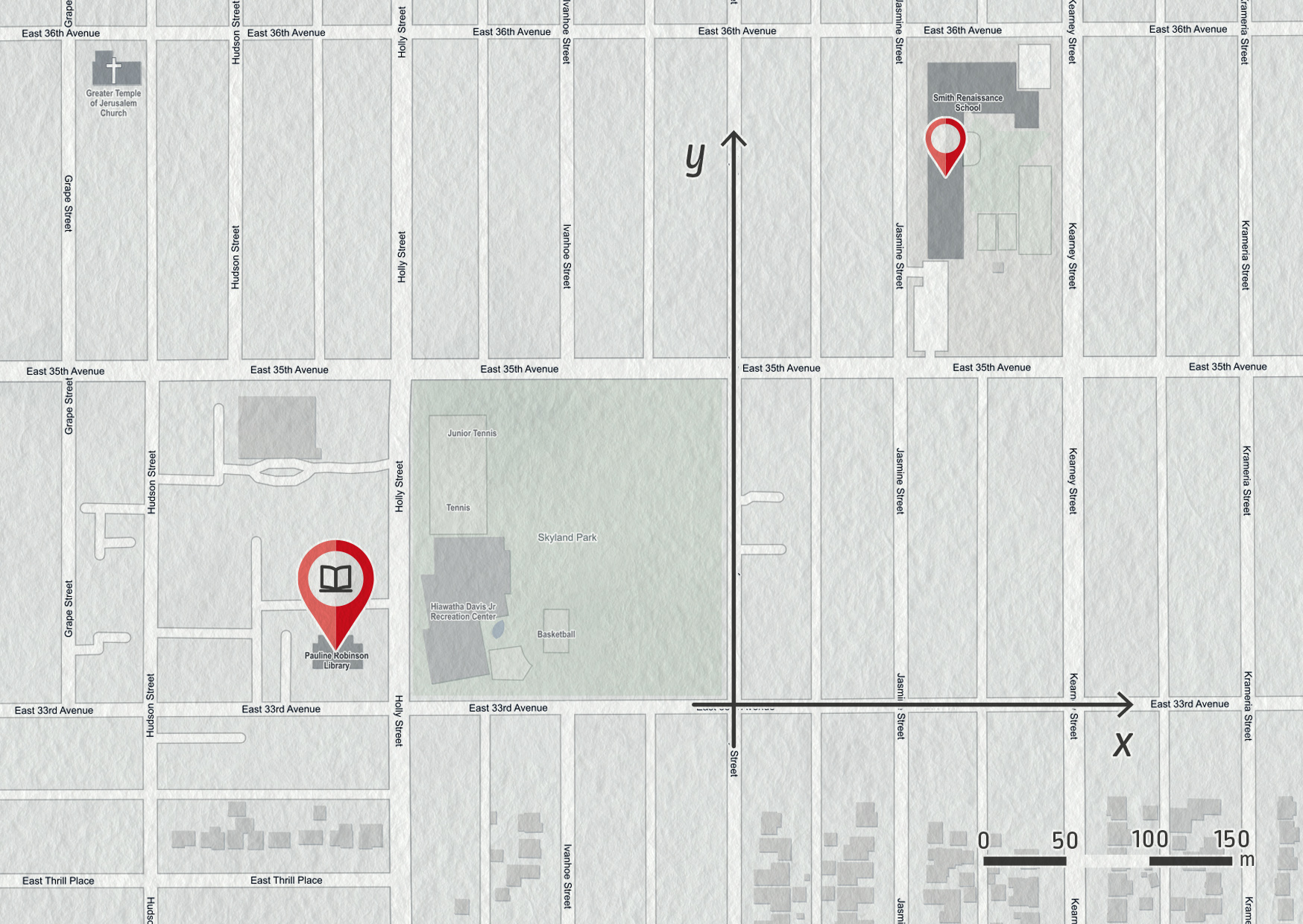
Andrew má v plánu navštívit po vyučování knihovnu Pauliny Robinsonové (Denver, USA).
Zdroj
- Určete souřadnice jeho školy Smith Renaissance School a souřadnice knihovny v zadaném souřadnicovém systému.
- Určete vektor posunutí mezi školou a knihovnou.
- Vypočítejte velikost vektoru posunutí. Odpovídá tato vzdálenost uražené vzdálenosti? Vysvětlete.
- \(\Vec{r}_\mathrm{s}=(150\ \mathrm{m};350\ \mathrm{m}\), \(\Vec{r}_\mathrm{l}=(-250\ \mathrm{m};50\ \mathrm{m})\)
- \(\Delta\Vec{r}=\Vec{r}_\mathrm{l}-\Vec{r}_\mathrm{s}=(-400\ \mathrm{m};-300\ \mathrm{m})\)
- \(|\Delta\Vec{r}|=500\ \mathrm{m}\), neodpovídá, uražená vzdálenost je větší
Cvičení 5
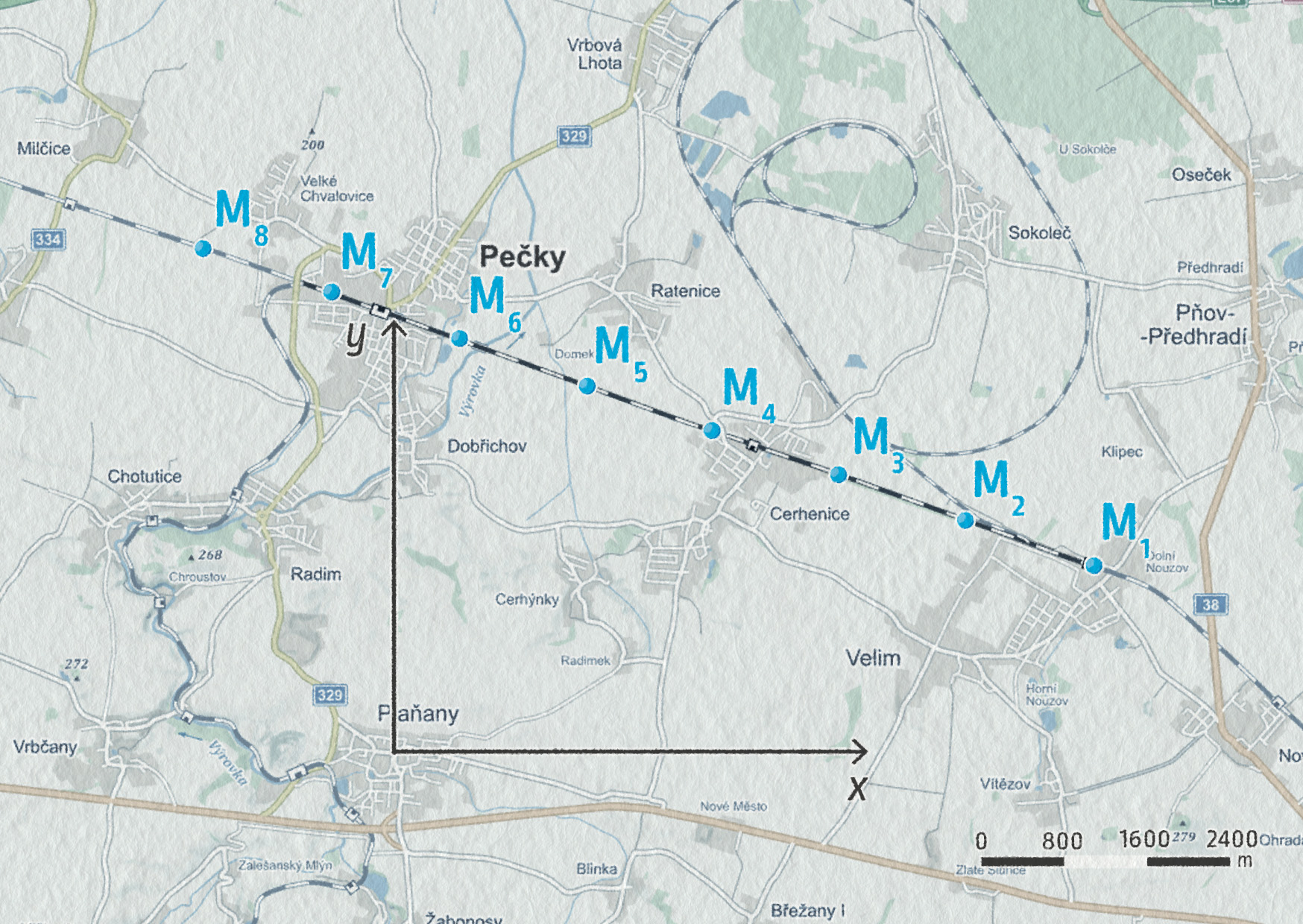
Vlaky mezi Kolínem a Prahou jezdí velmi rychle. Za Velimí následuje naprosto přímý úsek, kde vlaky dosahují maximálních rychlosti.
Zdroj
- Popište pohyb vlaku dle tvaru trajektorie.
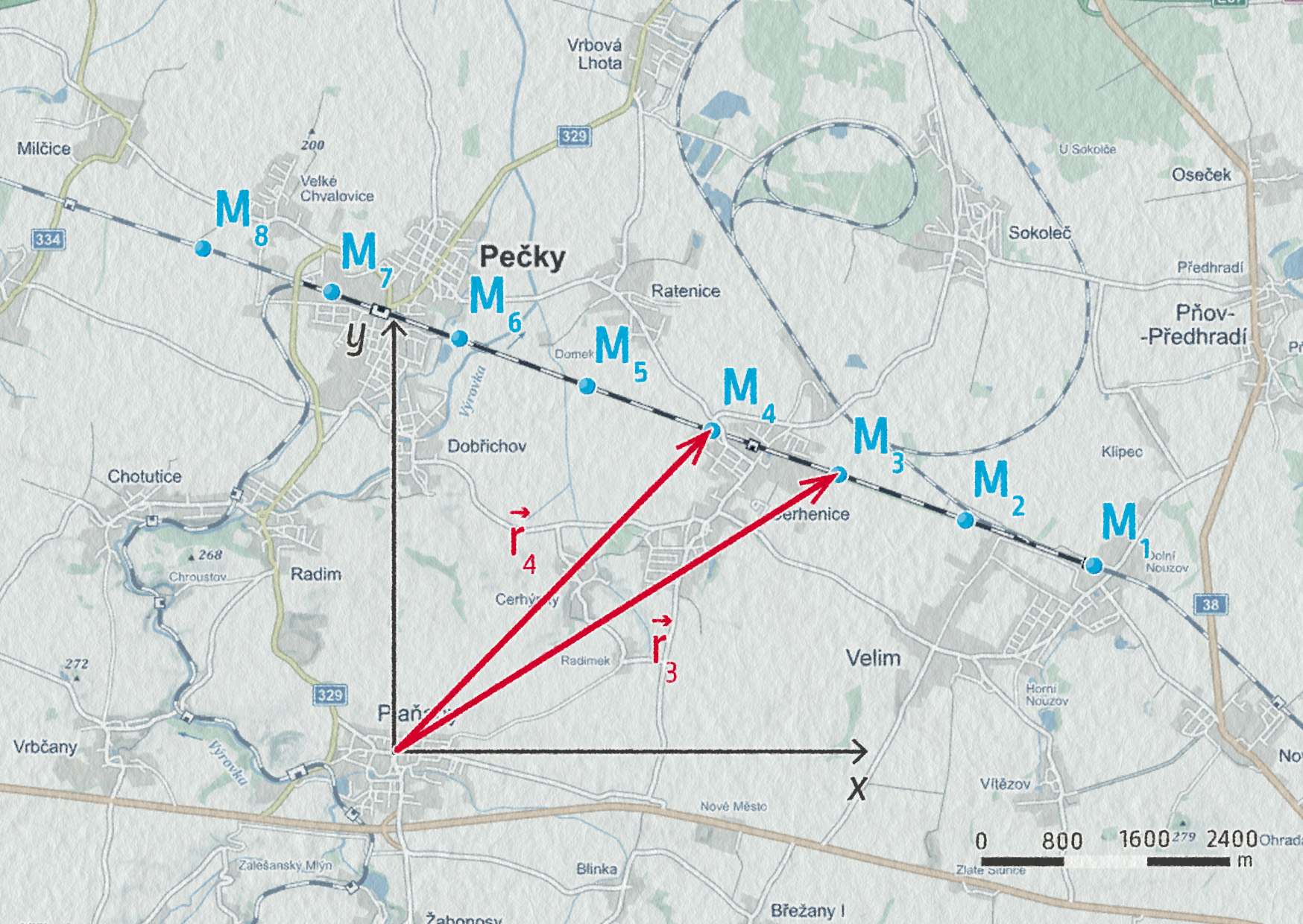
- Časový interval, který uplynul mezi označením dvou po sobě jdoucích poloh obrázku, je 30 s. Polohu vlaku budeme zaznamenávat vůči městu Plaňany. Znázorněte polohové vektory vlaku v bodech M3 a M4. Co o nich můžete říci?
- Zaneste do tabulky složky všech vektorů polohy z tohoto příkladu:
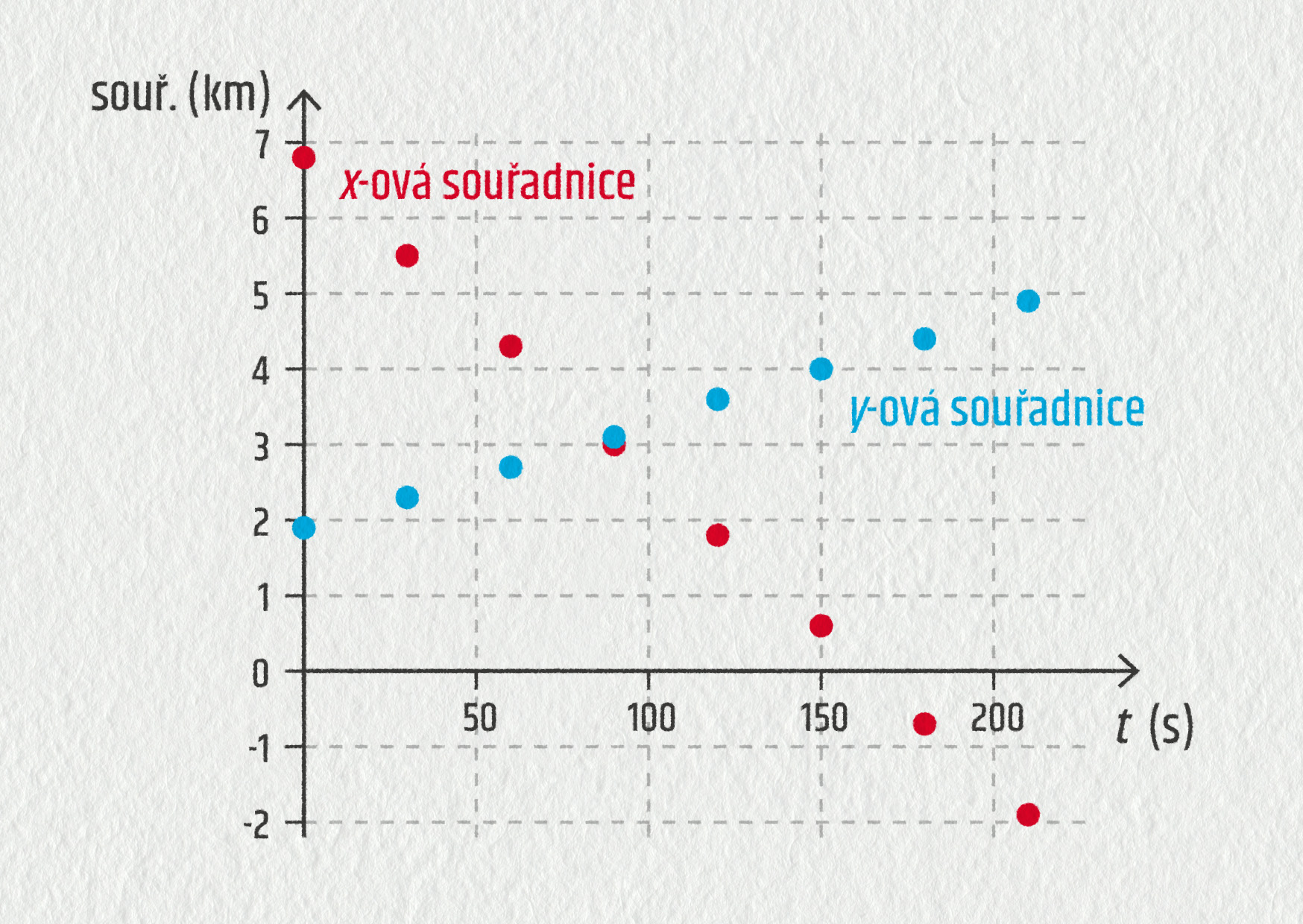
polohový vektor x-ová složka polohového vektoru (km) y-ová složka polohového vektoru (km) \(\Vec{r}_1\) \(\Vec{r}_2\) \(\Vec{r}_3\) \(\Vec{r}_4\) \(\Vec{r}_5\) \(\Vec{r}_6\) \(\Vec{r}_7\) \(\Vec{r}_8\) - Sestrojte grafy x-ové a y-ové souřadnice v závislosti na čase.
- Jak budou tyto grafy vypadat, když bude vlak stát v zastávce?
- rovnoměrný přímočarý pohyb;
- vektory nejsou shodné, poloha se mění, \(\Vec{r}_3=(4{,}3\ \mathrm{km};2{,}7\ \mathrm{km})\), \(\Vec{r}_4=(3{,}0\ \mathrm{km};3{,}1\ \mathrm{km})\), \(\Vec{r}_3\ne\Vec{r}_4\), polohové vektory jsou na obrázku;
- složky polohových vektorů jsou v tabulce;
- souřadnice jsou zakresleny v obrázku;
- jestliže vlak stojí v zastávce, grafem složek polohového vektoru jsou konstantní funkce
Zdroj
| polohový vektor | x-ová složka polohového vektoru (km) | y-ová složka polohového vektoru (km) |
|---|---|---|
| \(\Vec{r}_1\) | 6,8 | 1,9 |
| \(\Vec{r}_2\) | 5,5 | 2,3 |
| \(\Vec{r}_3\) | 4,3 | 2,7 |
| \(\Vec{r}_4\) | 3,0 | 3,1 |
| \(\Vec{r}_5\) | 1,8 | 3,6 |
| \(\Vec{r}_6\) | 0,6 | 4,0 |
| \(\Vec{r}_7\) | −0,7 | 4,4 |
| \(\Vec{r}_8\) | −1,9 | 4,9 |
Zdroj
Cvičení 6
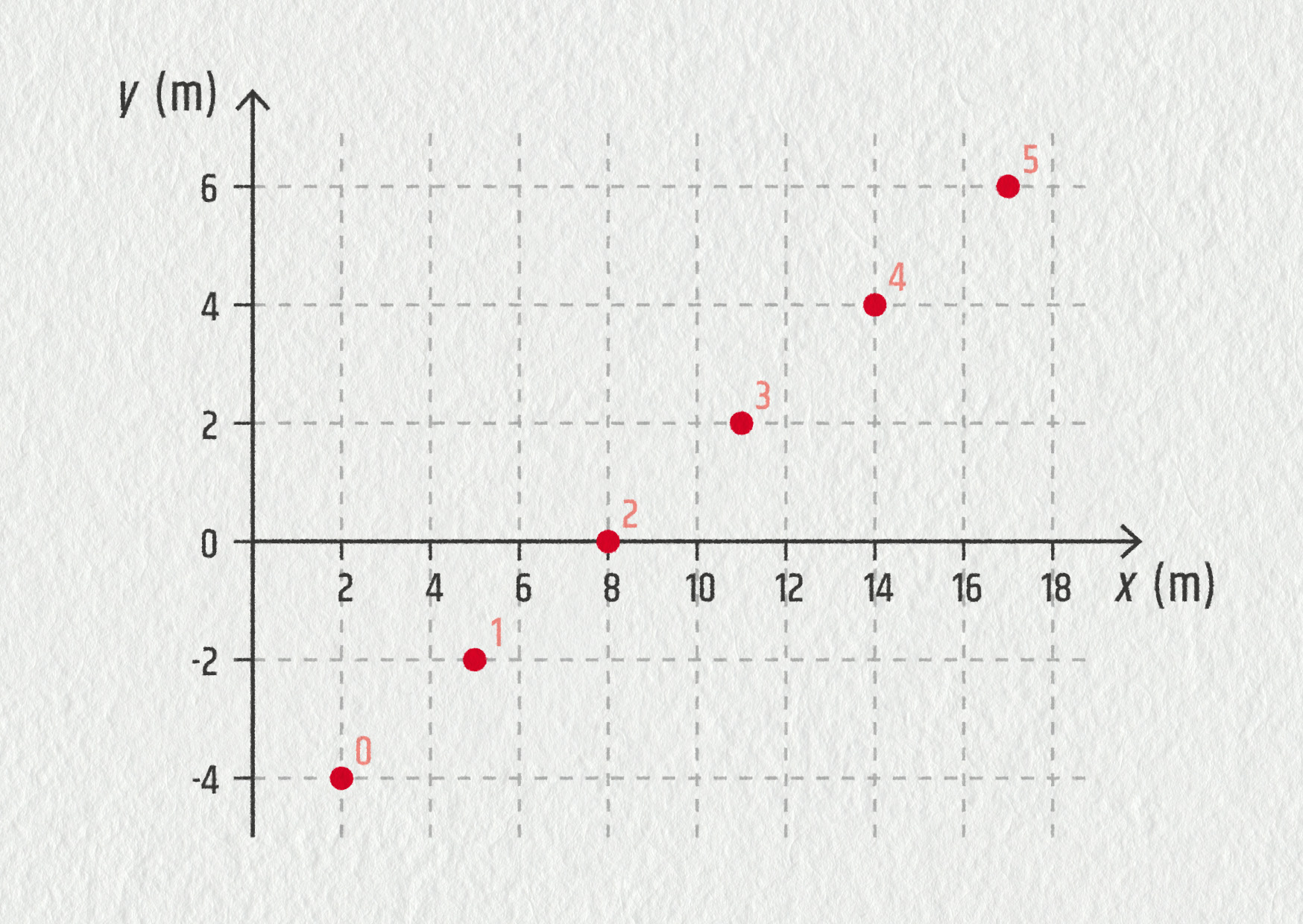
Těleso vykonává rovnoměrný pohyb. Jeho souřadnice splňují rovnice:
\[ x=2+3t \quad\hbox{a}\quad y=-4+2t\;, \quad t\in\Bbb{R}\;. \]Zakreslete polohy tělesa v rovině pro \(t=0,1,\dots,5\). Jaký je tvar trajektorie tělesa?
Poznámka: Proměnná \(t\) představuje čas v sekundách. Souřadnice x a y jsou v metrech. Lineární koeficienty 3 a 2 představují složky rychlosti v m/s.
trajektorií tělesa je přímka, řešení je zakresleno na obrázku
Zdroj
Cvičení 7
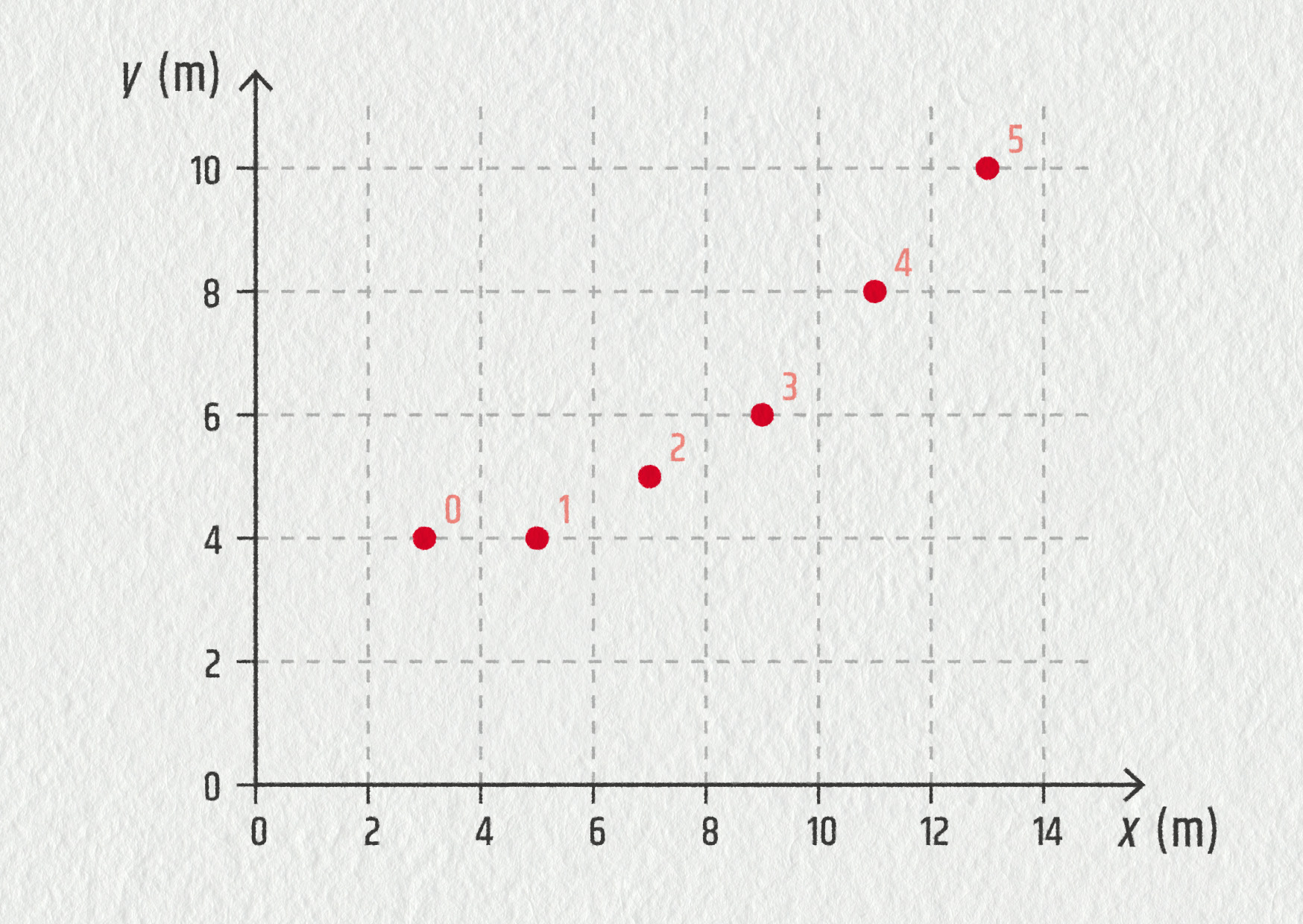
Těleso vykonává pohyb, jeho souřadnice splňují rovnice
\[ x=2t+3 \quad\hbox{a}\quad y=\frac{1}{4}t^2+4\;, \quad t\in\Bbb{R}\;. \]Zakreslete polohy tělesa v rovině pro \(t=0,1,\dots,5\). Jaký je tvar trajektorie tělesa?
Poznámka: Proměnná \(t\) představuje čas v sekundách. Souřadnice x a y jsou v metrech. Lineární koeficient 2 odpovídá rychlosti ve směru osy \(x\) a kvadratický koeficient 1/4 souvisí se zrychlením ve směru osy \(y\).
trajektorie je křivka – parabola, řešení je zakresleno na obrázku
Zdroj
