Na obrázku 16.7 je most architekta Václava Kociána a projektanta Davida Rose postavený v roce 2016 na železniční trati z Břeclavi do Vídně. Jedinečný svým designem i inženýrským řešením, pyšní se prvenstvím v celoevropské soutěži European Steel Bridge Awards. Bystrý pozorovatel zajisté ocení, jak dokonale stavba kopíruje linie okolní krajiny a jak se inženýři vypořádali s nepravoúhlým konceptem. Propočítat všechny tlaky a všechna napětí tak, aby jim odolaly namáhané součásti této důmyslné konstrukce, vyžaduje nemalou míru mistrovství a znalostí stavební mechaniky a nauky o vlastnostech materiálů. V této kapitole byste mimo jiné měli pochopit, jaké jsou ony základní fyzikální principy statiky staveb. Máte-li smysl pro hezké věci a současně hlavu na technická řešení, je stavebnictví dobrou volbou pro vaši profesní kariéru.

Zdroj
Posuvný a otáčivý pohyb
V předchozích kapitolách věnovaných mechanice jsme studovali situace, kdy tvar a rozměry tělesa nehrály podstatnou roli při jeho pohybu. Těleso jsme většinou bez dalšího vysvětlování nahradili hmotným bodem, vyšetřili, jaké síly na těleso působí, a pomocí Newtonových zákonů například předpověděli, jak se toto těleso bude pohybovat v budoucnosti. Toto zjednodušení lze provést jen v některých případech, jindy si s hmotným bodem nevystačíme.
V následujícím textu budeme předpokládat, že studované těleso má nezanedbatelné rozměry a že se jeho tvar, rozměry ani vnitřní rozložení hmoty nemohou měnit. Vytváříme tak zjednodušený model reality – model tuhého tělesa. Zjednodušení spočívá v tom, že síly působící na takové těleso mají pouze účinky pohybové, a nikoli deformační.
Ze všech možných druhů pohybů můžeme snadno popsat pohyb posuvný a pohyb otáčivý. Složitější pohyby je možné popsat jako složení pohybů posuvných a otáčivých.
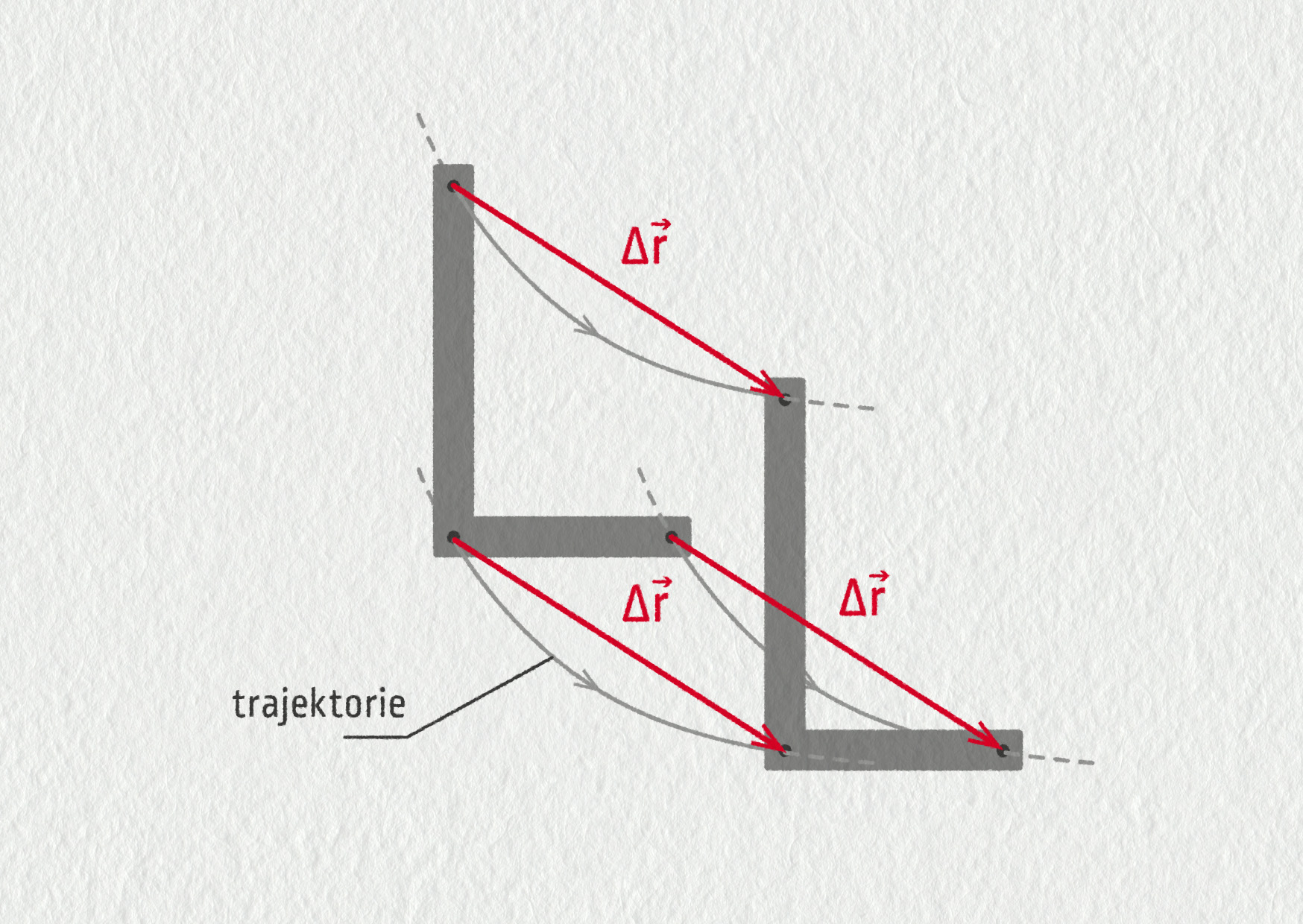
Posuvný pohyb neboli translace je charakteristický tím, že těžiště tělesa se v prostoru posouvá, ale těleso se při tom neotáčí. Znamená to, že za určitý čas \(\Delta t\) se všechny body tělesa (všechny části tělesa) posunou stejným směrem o stejnou vzdálenost. Lze tedy říci, že za čas \(\Delta t\) se všechny body tělesa posunou o stejný vektor \(\Delta\Vec{r}\). Při translaci mají v daný okamžik všechny body tělesa stejnou rychlost
\[ \Vec{v} = \frac{\Delta\Vec{r}}{\Delta t} \](velikost i směr) a pohybují se po trajektoriích stejného tvaru. Díky tomu můžeme v případě translace celé těleso nahradit jediným hmotným bodem a studovat pohyb jen tohoto hmotného bodu podle pravidel, která jsme se o pohybech dosud naučili. Posuvný pohyb vykonává např. konec prstu, kterým táhnete po displeji telefonu, řidič s autem na přímé silnici, píst ve spalovacím motoru atd.
Zdroj
Otáčivý pohyb neboli rotace se vyznačuje tím, že se těleso otáčí kolem určité osy, aniž se tato osa v prostoru nějak pohybuje. Osu otáčení budeme v našem výkladu značit písmenem \(z\). Za určitý čas \(\Delta t\) opíší všechny body tělesa (všechny části tělesa) stejný úhel \(\Delta\varphi\) kolem téže osy \(z\). To znamená, že všechny body tělesa mají v daný okamžik stejnou úhlovou rychlost
\[ \omega = \frac{\Delta\varphi}{\Delta t} \]
Zdroj
Na obrázku 16.9 je vidět, že body tělesa se pohybují po soustředných kružnicích, jejichž středy leží na ose otáčení. Je také zřejmé, že při rotaci nemohou mít všechny části tělesa stejnou rychlost a že tato rychlost se zvětšuje spolu se vzdáleností od osy \(z\). Opíše-li totiž bod ve vzdálenosti \(r\) od osy otáčení oblouk o délce \(\Delta s\) za čas \(\Delta t\), bude velikost jeho rychlosti
\[v=\Delta s/\Delta t=\Delta\varphi\cdot r/\Delta t=\omega r\]Pokud se těleso otáčí stálou úhlovou rychlostí, můžeme pro každý jeho bod používat vztahy platné pro rovnoměrný pohyb po kružnici. Otáčivý pohyb vykonává např. vrtule větrné elektrárny, řidič s autem na kruhovém objezdu, ručička na věžních hodinách atd.

Zdroj
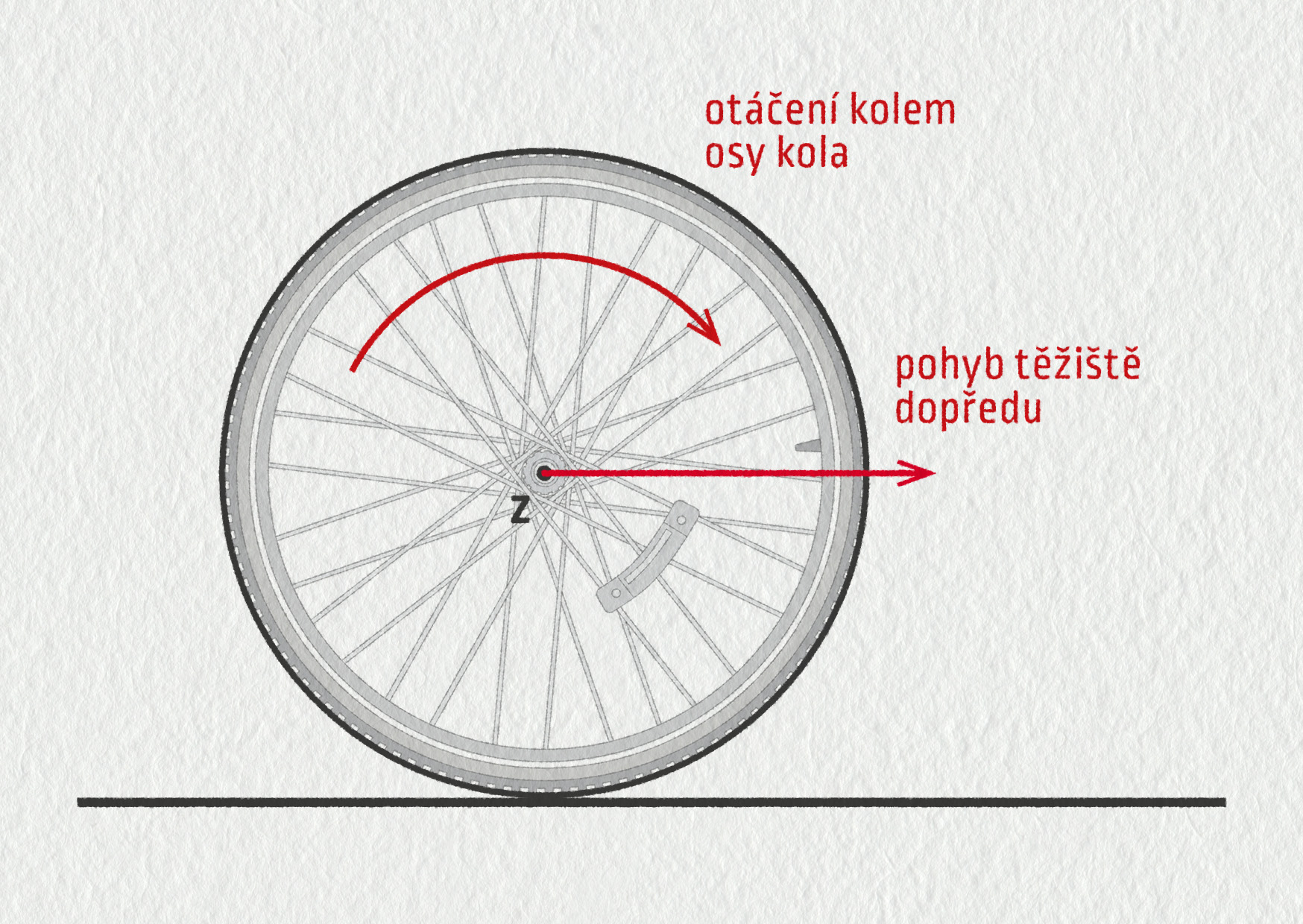
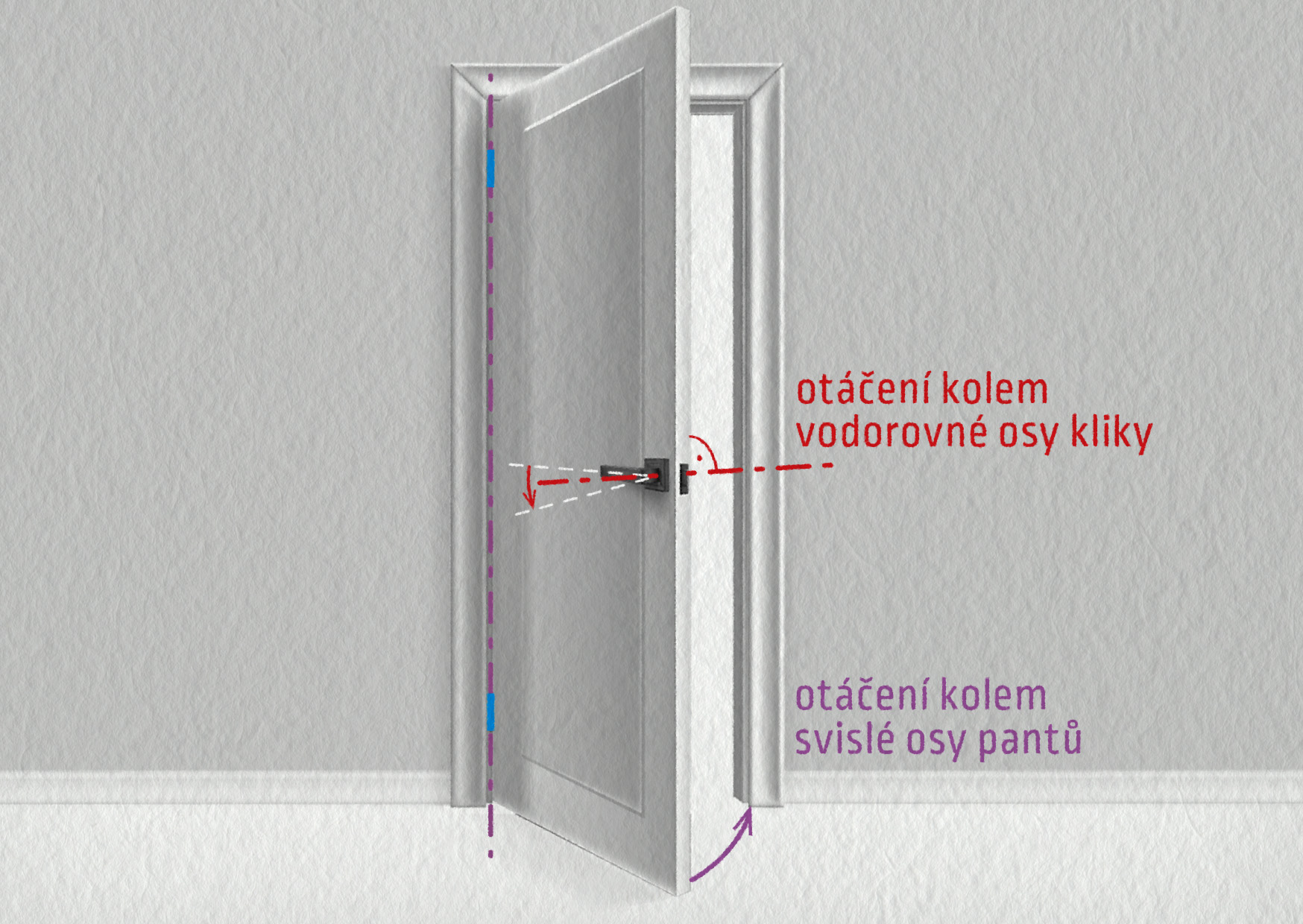
Složený pohyb vznikne, pokud předchozí pohyby probíhají současně. Složení translace a rotace můžeme pozorovat například u kola automobilu: kolo se otáčí kolem svojí osy a současně se tato osa posouvá ve směru jízdy. Složený pohyb vznikne i kombinací dvou rotací kolem dvou různých os, jako je tomu u kliky dveří: při zavírání dveří se klika i s dveřmi otáčí kolem svislé osy procházející panty, a pokud při tom kliku stiskneme, bude se současně otáčet i kolem vodorovné osy. Poznamenejme, že při skládání dvou translací má výsledný pohyb stále vlastnosti posuvného pohybu: parašutista klesající k zemi, jehož unáší boční vítr, se neotáčí, jeho tělo je stále ve svislé poloze.
Skládání pohybů
Zdroj
Zdroj

Zdroj
Prohlédněte si následující galerii a rozhodněte, jaký druh pohybu vykonávají vyfotografovaná tělesa. Do pole pro odpověď napište písmeno T v případě translace, R v případě rotace, nebo S v případě složeného pohybu.